


Smarte robotplæneklippere anses for at være et milliardmarked, primært baseret på følgende overvejelser:
1. Stor markedsefterspørgsel: I regioner som Europa og Nordamerika er det meget almindeligt at eje en privat have eller græsplæne, hvilket gør græsslåning til en essentiel opgave i hverdagen. Traditionel manuel græsslåning eller at ansætte arbejdere til græsslåning er ikke kun tidskrævende og arbejdskrævende, men også dyrt. Derfor er der en betydelig markedsefterspørgsel efter smarte robotplæneklippere, der autonomt kan udføre græsslåningsopgaver.
2. Teknologiske innovationsmuligheder: Med den kontinuerlige udvikling af teknologier som sensorer, navigationssystemer og kunstig intelligens er ydeevnen af smarte robotplæneklippere løbende blevet forbedret, og deres funktionaliteter er blevet stadig mere avancerede. De kan opnå autonom navigation, undgåelse af forhindringer, ruteplanlægning, automatisk genopladning osv., hvilket i høj grad forbedrer effektiviteten og bekvemmeligheden ved plæneklipning. Denne teknologiske innovation yder stærk støtte til den hurtige udvikling af markedet for smarte robotplæneklippere.
3. Tendenser inden for miljøbeskyttelse og energieffektivitet: Sammenlignet med traditionelle manuelle eller benzindrevne plæneklippere har smarte robotplæneklippere lavere støj og emissioner, hvilket resulterer i mindre miljøpåvirkning. Drevet af tendenser inden for miljøbeskyttelse og energieffektivitet vælger et stigende antal forbrugere smarte robotplæneklippere til at erstatte traditionelle græsslåningsmetoder.
4. Moden industrikæde: Kina har en komplet maskinproduktionskæde med stærke kapaciteter inden for forskning og udvikling, design, fremstilling og salg. Dette gør det muligt for Kina hurtigt at reagere på de globale markedskrav og producere konkurrencedygtige intelligente robotplæneklippere af høj kvalitet. Derudover forventes Kinas andel af det globale marked for intelligente robotplæneklippere at stige yderligere med overførslen og opgraderingen af globale fremstillingsindustrier.
Kort sagt, baseret på faktorer som enorm markedsefterspørgsel, muligheder som følge af teknologisk innovation, tendenser inden for miljøbeskyttelse og energieffektivitet samt en moden industrikæde, anses smarte robotplæneklippere for at have et potentielt marked på flere milliarder dollars.
Projektmål
Her er et hurtigt overblik over projektets mål:
✔️ Automatisk plæneklipning: Enheden skal kunne klippe plænen automatisk.
✔️ Gode sikkerhedsfunktioner: Enheden skal være sikker, for eksempel ved nødstop, når den løftes eller støder på forhindringer.
✔️ Intet behov for kantledninger: Vi ønsker fleksibilitet og understøttelse af flere græsslåningsområder uden behov for kantledninger.
✔️ Lav pris: Det bør være billigere end kommercielle produkter i mellemklassen.
✔️ Åben: Jeg vil dele viden og gøre det muligt for andre at bygge OpenMower.
✔️ Æstetisk: Du bør ikke føle dig flov over at bruge OpenMower til at slå græsplænen.
✔️ Undgåelse af forhindringer: Plæneklipperen skal registrere forhindringer under klipning og undgå dem.
✔️ Regnsensor: Enheden skal kunne registrere ugunstige vejrforhold og sætte græsslåningen på pause, indtil forholdene forbedres.
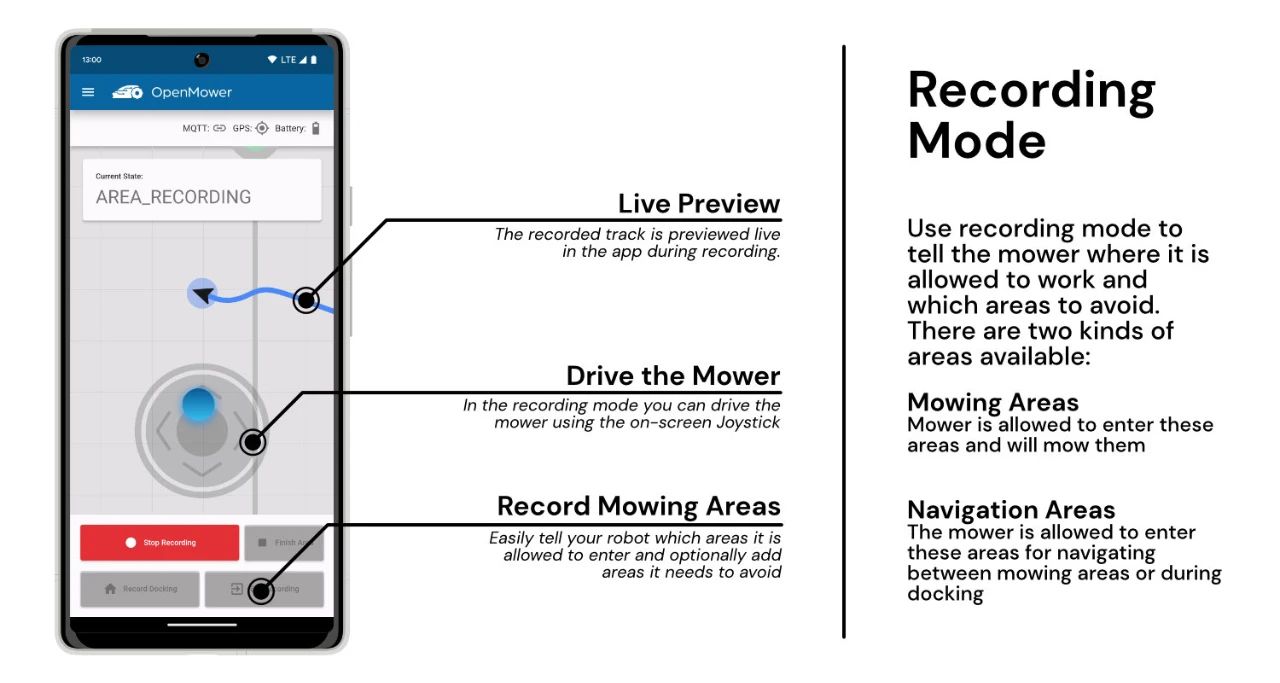
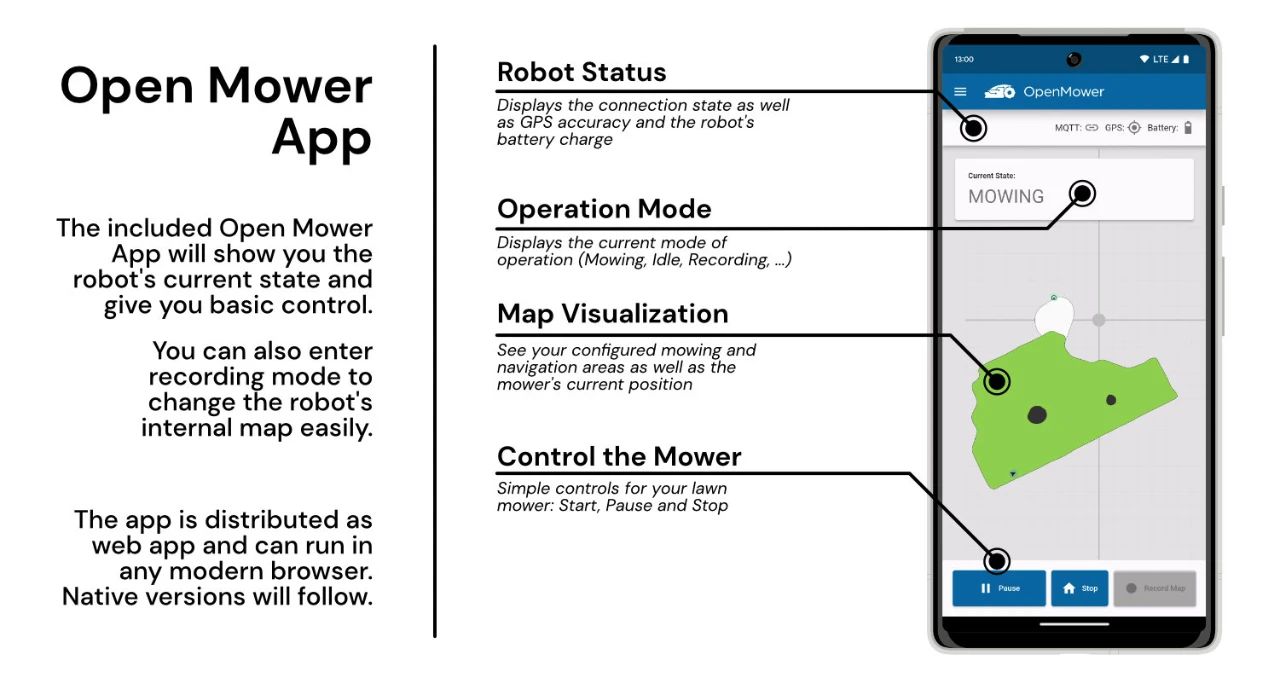
App-udstilling
Hardware
Indtil videre har vi en stabil version af bundkortet og to tilhørende motorcontrollere. xESC mini og xESC 2040. I øjeblikket bruger jeg xESC mini til at bygge den, og den fungerer fint. Problemet med denne controller er, at det er svært at finde dens komponenter. Derfor skaber vi xESC 2040 baseret på RP2040-chippen. Dette er en billig variant, som i øjeblikket er på eksperimentel stadie.
Hardware-to-do-liste
Projekttilgang
Vi skilte den billigste standardrobotplæneklipper, vi kunne finde (YardForce Classic 500), ad og blev positivt overraskede over kvaliteten af hardwaren:
Geardrevne børsteløse motorer til hjulene
Børsteløse motorer til selve plæneklipperen
Den overordnede struktur virkede robust, vandtæt og velgennemtænkt
Alle komponenter blev forbundet med standardstik, hvilket gjorde hardwareopgraderinger nemme.
Plæneklipperens bundkort

ROS-arbejdsområde
Denne mappe fungerer som ROS-arbejdsområdet, der bruges til at bygge OpenMower ROS-softwaren. Lageret indeholder ROS-pakker til styring af OpenMower.
Den refererer også til andre repositorier (biblioteker), der er nødvendige for at bygge softwaren. Dette giver os mulighed for at spore de nøjagtige versioner af de pakker, der bruges i hver udgivelse, for at sikre kompatibilitet. I øjeblikket inkluderer den følgende repositorier:
slic3r_coverage_planner:En 3D-printer dækningsplanlægger baseret på Slic3r-softwaren. Denne bruges til at planlægge slåningsruterne.
teb_lokal_planlægger:Den lokale planlægger, der gør det muligt for robotten at navigere uden om forhindringer og følge den globale bane, samtidig med at den overholder kinematiske begrænsninger.
xesc_ros:ROS-grænsefladen til xESC-motorstyringen.

I Europa og Amerika har mange husstande deres egne haver eller græsplæner på grund af rigelige jordressourcer, hvilket kræver regelmæssig græsslåning. Traditionelle græsslåningsmetoder involverer ofte ansættelse af arbejdskraft, hvilket ikke kun medfører høje omkostninger, men også kræver en betydelig mængde tid og kræfter til tilsyn og administration. Derfor har intelligente automatiserede plæneklippere et stort markedspotentiale.
Automatiserede plæneklippere integrerer avancerede sensorer, navigationssystemer og kunstig intelligens-teknologi, der gør det muligt for dem autonomt at slå græsplæner, navigere forhindringer og planlægge stier. Brugere behøver kun at indstille klippeområdet og -højden, og den automatiserede plæneklipper kan udføre klippeopgaven automatisk, hvilket forbedrer effektiviteten betydeligt og sparer arbejdsomkostninger.
Derudover har automatiske plæneklippere fordelene ved at være miljøvenlige og energieffektive. Sammenlignet med traditionelle manuelle eller benzindrevne plæneklippere producerer automatiske plæneklippere lavere støj og emissioner, hvilket resulterer i minimal miljøpåvirkning. Derudover kan automatiske plæneklippere justere klippestrategier baseret på plænens faktiske forhold og dermed undgå energispild.
For at komme ind på dette marked og opnå succes er der dog flere faktorer, der skal tages i betragtning. For det første skal teknologien bag automatiske plæneklippere være moden og pålidelig for at imødekomme brugernes praktiske behov. For det andet er prissætning også en afgørende faktor, da for høje priser kan hindre produktadoption. Endelig er det vigtigt at etablere et omfattende salgs- og servicenetværk for at give brugerne bekvem support og service.
Afslutningsvis har intelligente automatiske plæneklippere et enormt potentiale på de europæiske og amerikanske markeder. At opnå kommerciel succes kræver dog en indsats inden for teknologi, prisfastsættelse og service.

Hvem kan gribe denne milliardmulighed?
Teknologisk forskning og udvikling:Kontinuerligt investere i forsknings- og udviklingsressourcer for at forbedre intelligensen, effektiviteten og pålideligheden af automatiske plæneklippere. Fokuser på at forstå brugernes behov og lovgivningsmæssige krav på de europæiske og amerikanske markeder for at sikre, at produkterne overholder relevante standarder.
Brandopbygning:Etablere brandimaget for kinesiske smarte plæneklippere på det internationale marked for at øge forbrugernes kendskab til og tillid til kinesiske produkter. Dette kan opnås gennem deltagelse i internationale udstillinger og fælles markedsføring med lokale partnere i Europa og Amerika.
Salgskanaler:Etablere et omfattende salgsnetværk og servicesystem for at sikre problemfri adgang for produkter til de europæiske og amerikanske markeder og yde rettidig teknisk support og service. Overvej samarbejde med lokale detailhandlere og distributører i Europa og Amerika for at udvide salgskanalerne.
Opslagstidspunkt: 22. marts 2024